全1064文字
大林組は、建設現場内を自律走行する無人搬送車(以下、AGV)を、複数台連携させるシステムを開発した。仮設エレベーターの待ち時間や昇降回数を減らせるので、AGVの稼働率が向上する。2021年10月11日に発表した。
同社の低床式AGVは、小型・軽量であるため、資材を積載した状態で工事用の仮設エレベーターに乗降でき、資材ヤードから搬送先まで、資材の載せ替えをせずに搬送が可能だ。従来は3~4人の作業員が人力で運んでいた資材を、オペレーター1人が操作して安全に運べるというメリットがある。
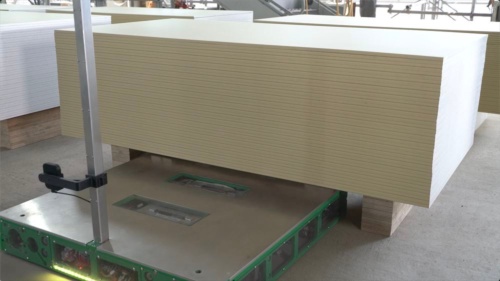
低床式AGVによる資材積み下ろし作業の様子。車高が低く、コンパクトなため、車体全体が枕木の上に積まれた資材の下に入り込み、持ち上げて搬送する(写真:大林組)
[画像のクリックで拡大表示]

低床式AGVが仮設エレベーターに乗り込む様子(写真:大林組)
[画像のクリックで拡大表示]
今回は、現場の図面や配置図などのPDFファイルをシステムに入力して、その上に搬送先と経由地の座標を指定することで、障害物を回避しながら自動走行する自律搬送機能を追加した。米国のSRI Internationalとの共同開発によるものだ。
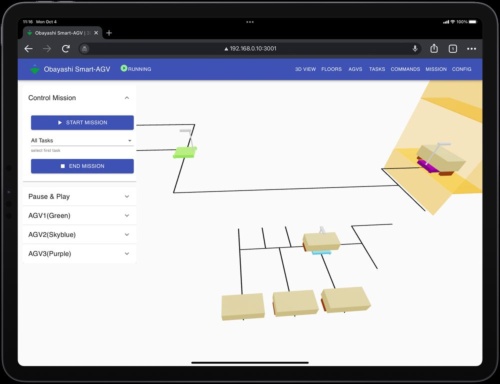
ユーザーインターフェースのイメージ画像。各AGVとエレベーターの連携はオペレーターの手元の端末で把握することができる(資料:大林組)
[画像のクリックで拡大表示]
以前は床面に磁気テープを貼付して経路を形成していたため、決められた経路以外は走行できず、障害物がある場合は停止するだけで、回避はできなかった。また、磁気テープなどを使わない無軌道走行の場合、現場を事前に走行させてマップデータを構築する必要があった。現場では工事の進捗によって通路や施工エリア、資材置き場の配置などが変わるので、しばしばAGVを事前走行させてマップデータを更新させる手間がかかっていた。
















































